2. Inverse Kinematics
Summary:
The inverse kinematics method used for this project was a Jacobian-based damped least squares iterative method. This allowed us to take in a path that was generated either via G-Code+Parsing or from the path generation and then generate joint angles that can be fed through our interface for robot positioning. The validity of the method is shown through robot simulations and through testing of the paths on the Dofbot.
Theory:
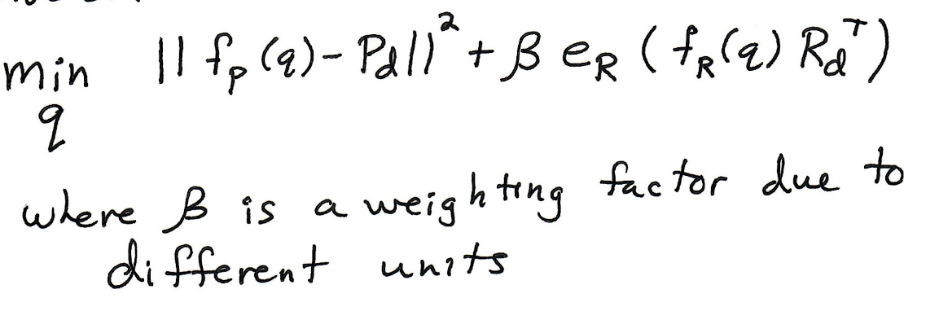
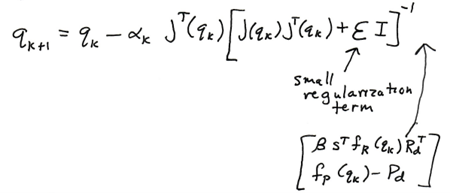
This method of inverse kinematics utilizes the minimization of the equation shown in Figure 1. And the updated law which is shown in Figure 2 reduces the cost function until a solution is found.
Application:
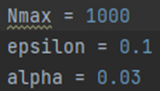
This method for inverse kinematics was programmed in python. In the application of the Dofbot, a Pd in the form of the path coordinates were inputs to the program. The algorithm required some tuning of the parameters in order to converge to a joint angle in a reasonable amount of time and with a desired level of accuracy. The tuned parameters for the algorithm are shown in Figure 3. Alpha was decreased to avoid instability in generated joint angles and Nmax was increased to ensure the IK implementation was reliable and reached actual values. All of the animations developed for this project used the joint angles developed from this algorithm.
Contact Me
Email: michael.aksen@gmail.com
LinkedIn: https://www.linkedin.com/in/aksenm/